
مقدمه
در پارادایم سنتی هوش مصنوعی که برای دههها حاکم بود، ما با یک هوش غیرجسمانی (Disembodied) و دیجیتال مواجه بودیم. این سیستمها با تمام توانمندیهای چشمگیر خود در تحلیل داده و زبان، در نهایت به نقش یک ناظر منفعل محدود بودند و توانایی کنشگری مستقیم در جهان فیزیکی را نداشتند.
امروز، ما در آستانه یک تحول بنیادین قرار داریم: گذار از هوش محاسباتی به هوش مصنوعی تجسدیافته (Embodied AI). این پارادایم نوین، که در تقاطع هوش مصنوعی، رباتیک و علوم شناختی قرار دارد، به دنبال ساخت عاملان هوشمندی است که دارای بدنی فیزیکی هستند و میتوانند از طریق ادراک حسی و اقدام عملی، به صورت مستقیم با دنیای واقعی تعامل کرده و از آن بیاموزند. این مطلب به کالبدشکافی این حوزه هیجانانگیز میپردازد.
فلسفه وجودی: چرا به هوشِ تجسدیافته نیاز داریم؟
ظهور هوش مصنوعی تجسدیافته صرفاً یک پیشرفت مهندسی نیست، بلکه پاسخی به برخی از عمیقترین محدودیتهای هوش مصنوعی سنتی است. یکی از این محدودیتها، “مشکل زمینهسازی” (The Grounding Problem) است. مدلهای زبانی بزرگ (LLMs) کلمه “سیب” را از طریق ارتباط آماری آن با میلیاردها کلمه دیگر درک میکنند، اما هرگز یک سیب واقعی را لمس نکرده، بوی آن را حس نکرده یا طعم آن را نچشیدهاند. دانش آنها در واقعیت فیزیکی “زمینهسازی” نشده است. هوش مصنوعی تجسدیافته با اتصال ادراک به اقدام، این شکاف را پر میکند و به ماشین اجازه میدهد تا مفاهیم را از طریق تجربه مستقیم و فیزیکی بیاموزد.
این رویکرد همچنین به پارادوکس موراوِک (Moravec’s Paradox) پاسخ میدهد. این پارادوکس بیان میکند که در هوش مصنوعی، کارهایی که برای انسان دشوار است (مانند شطرنج یا محاسبات پیچیده)، برای ماشین آسان است و کارهایی که برای یک کودک یکساله آسان است (مانند راه رفتن، برداشتن یک اسباببازی یا تشخیص چهره)، برای ماشین فوقالعاده دشوار است. هوش مصنوعی تجسدیافته مستقیماً به سراغ حل بخش دوم این پارادوکس میرود و تلاش میکند تا به رباتها تواناییهای حسی-حرکتی شهودی انسان را بیاموزد.
آناتومی یک عامل تجسدیافته
یک سیستم هوش مصنوعی تجسدیافته از یک چرخه پیوسته به نام “حلقه ادراک-اقدام” (Perception-Action Loop) تشکیل شده است.
اجزای اصلی این چرخه عبارتند از:
- الف) کالبد فیزیکی (The Body): این بخش شامل ساختار فیزیکی ربات است که میتواند از یک بازوی صنعتی ساده تا یک ربات چهارپا یا یک ربات کاملاً انساننما (Humanoid) متغیر باشد. طراحی بدنه مستقیماً بر تواناییهای ربات برای تعامل با محیط تأثیر میگذارد.
- ب) سیستم ادراک چندوجهی (The Senses): اینجا جایی است که هوش مصنوعی چندوجهی به عنوان سیستم عصبی ربات عمل میکند. حسگرهای کلیدی عبارتند از:
- بینایی (Vision): دوربینهای RGB و حسگرهای عمق (Depth Sensors) برای دیدن و درک صحنه.
- شنوایی (Audition): میکروفونها برای درک دستورات صوتی و صداهای محیطی.
- حس عمقی (Proprioception): حسگرهایی در مفاصل ربات که به آن اطلاع میدهند وضعیت بدنیاش در فضا چگونه است (مشابه حسی که به ما میگوید دستمان کجاست، حتی اگر آن را نبینیم).
- لامسه (Tactile Sensing): حسگرهای فشار و نیرو در انگشتان و گیرهها برای درک میزان سختی، بافت و وزن اشیا.
- ج) مغز: مدلهای تصمیمگیری و کنترل (The Brain): این هسته هوش مصنوعی سیستم است. مدلهای پیشرفتهای مانند یادگیری تقویتی (Reinforcement Learning) و یادگیری تقلیدی (Imitation Learning) در اینجا به کار میروند. “مغز” ربات، دادههای دریافتی از حواس را تحلیل کرده، هدف نهایی (مثلاً “در را باز کن”) را درک میکند و سپس یک توالی از حرکات دقیق را برای رسیدن به آن هدف، برنامهریزی میکند.
- د) عملگرها (The Actuators): اینها “عضلات” ربات هستند. موتورها، مفاصل و گیرهها که دستورات دیجیتالی صادر شده از مغز را به حرکت فیزیکی در دنیای واقعی ترجمه میکنند.
کاربردهای عملی: از کارخانه تا خانه (وضعیت در سال ۲۰۲۵)
هوش مصنوعی تجسدیافته به سرعت در حال خروج از آزمایشگاهها و ورود به دنیای واقعی است.
- تولید و لجستیک: شرکتهایی مانند Figure AI با همکاری BMW در حال آزمایش رباتهای انساننما در خطوط تولید خودرو هستند. این رباتها وظایفی را انجام میدهند که نیازمند انعطافپذیری و مهارتی فراتر از توانایی رباتهای صنعتی سنتی است.
- دستیاران خانگی: اگرچه این دستیاران هنوز در مراحل اولیه است، اما شرکتها در حال توسعه رباتهایی هستند که میتوانند در کارهای خانه مانند مرتب کردن وسایل، آوردن اشیا و کمک به سالمندان مفید باشند.
- مراقبتهای بهداشتی: رباتهای جراح که با کمک هوش مصنوعی و بازخورد لمسی، دقت جراحیها را افزایش میدهند و رباتهای کمکی که به توانبخشی بیماران کمک میکنند.
- اکتشاف در محیطهای خطرناک: رباتهای چهارپا مانند Spot از شرکت Boston Dynamics برای بازرسی مکانهای خطرناک مانند سایتهای ساختمانی، معادن و مناطق فاجعهزده استفاده میشوند.
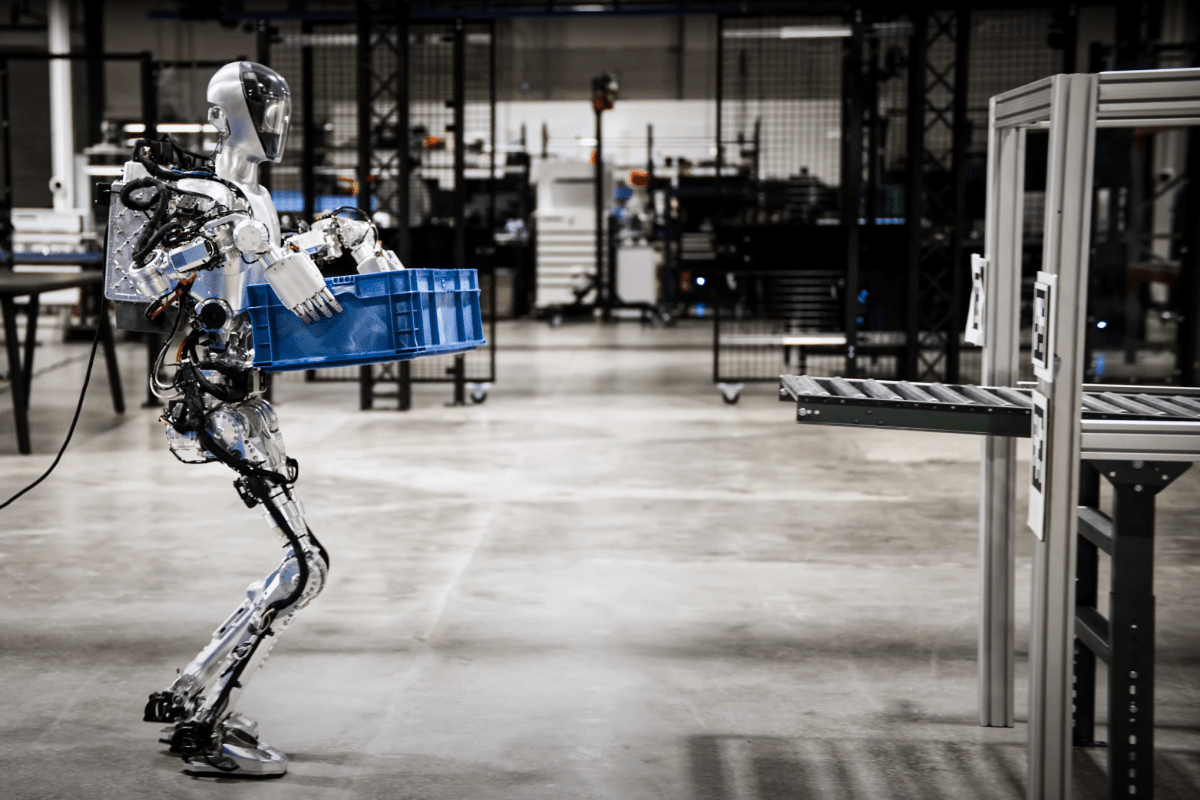
ربات انساننمای Figure 01 در حال کار در کارخانه BMW
چالشهای بزرگ پیش رو
با وجود پیشرفتهای چشمگیر، مسیر پیش رو همچنان با چالشهای بزرگی همراه است:
- شکاف شبیهسازی تا واقعیت (Sim-to-Real Gap): آموزش رباتها در محیطهای شبیهسازی شده بسیار سریعتر و ارزانتر است، اما انتقال مهارتهای آموخته شده از دنیای بینقص شبیهسازی به دنیای پر از هرجومرج و غیرقابل پیشبینی واقعی، بسیار دشوار است.
- تعمیمپذیری (Generalization): چگونه میتوان رباتی ساخت که اگر یاد گرفت یک فنجان را بردارد، بتواند به طور خودکار یک بطری یا یک کتاب را نیز بردارد، بدون آنکه نیاز به آموزش مجدد و گسترده داشته باشد؟
- ایمنی و تعامل با انسان: تضمین اینکه یک ربات قدرتمند و متحرک، در هیچ شرایطی به انسان یا محیط اطراف آسیب نمیرساند، یک چالش فنی و اخلاقی حیاتی است.
در پایان باید گفت که هوش مصنوعی تجسدیافته صرفاً ساخت رباتهای باهوشتر نیست؛ بلکه یک تغییر پارادایم در مورد ماهیت خود هوش است. این حوزه استدلال میکند که هوش واقعی نمیتواند در انزوا و به صورت انتزاعی وجود داشته باشد، بلکه باید از طریق تعامل مداوم با جهان فیزیکی شکل گرفته و پالایش شود. با هر قدمی که این رباتها در دنیای ما برمیدارند، ما نه تنها به آیندهای با دستیاران فیزیکی تواناتر نزدیک میشویم، بلکه درک خود از معنای “هوش” را نیز عمیقتر میسازیم.
منابع: